Vom 28.10.2023 – 01.11.2023 fand auf der Consumenta 2023 in Nürnberg der RoboCup RMRC – Rapidly Manufactured Robot Challenge statt. Es traten insgesamt fünf Schulteams im Wettberwerb an. Die Arena war im Teil der Ohm Robotik Arena der Technischen Hochschule Nürnberg zu finden. Bei dem Wettbewerb geht es darum selbst gebaute Roboter gegeneinander antreten zu lassen. Dabei kommt es vor allem auf eine gute Geländegängigkeit an. Aber auch die Software kommt hier nicht zu kurz, da z.B. automatisch QR-Codes erkannt und in eine Text Datei eingetragen werden müssen. Hinzu kommt, dass die Roboter teleoperiert, also ohne direkten Sichtkontakt, gesteuert werden müssen.
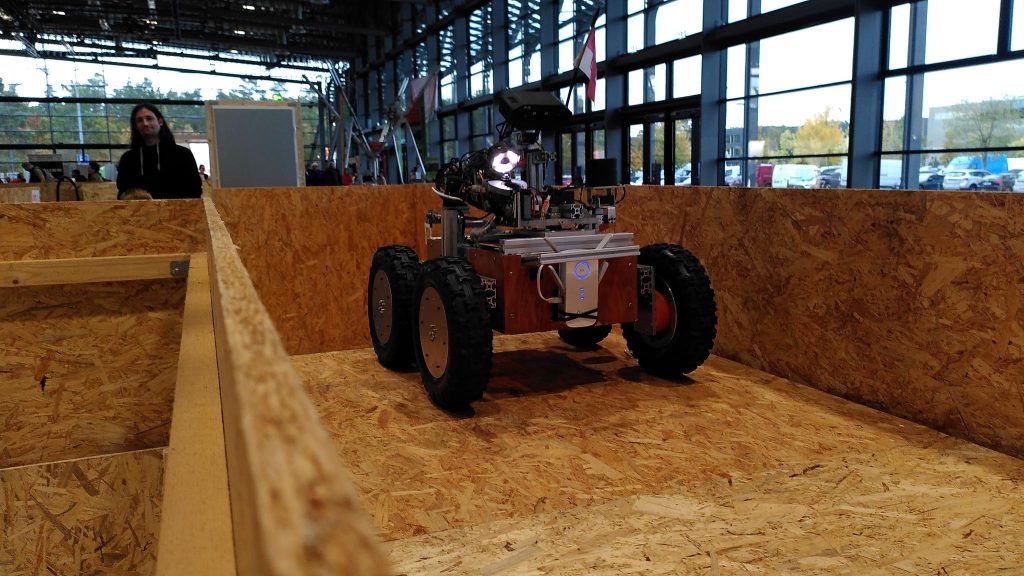
Ein Teil des Wettbewerbs war unter anderem die Team Challenge. Hier ging es darum möglichst viele Ballons in schwer erreichbaren Bereichen zum Platzen zu bringen, um Punkte zu erzielen. Im unteren Bild ist das Team Bento kurz davor einen Punkt während der Team Challenge zu erzielen, indem es den Ballon platzen lässt. Um diesen zu erreichen muss das Stepfield gemeistert werden und danach geht es durchs Schotterbett in die Sandkiste.
Team Bento während der Team Challenge
FRANCOR e.V. war mit dabei, um die Schulteams beim Bau Ihrer Roboter zu unterstützen. Hauptsächlich haben wir bei Software-Themen rund um ROS2 geholfen.
Es hat großen Spaß gemacht und wir freuen uns bereits auf die nächsten Events mit den Schülerinnen und Schülern. Es ist beeindruckend was die Schulteams für eine Leistung abliefern, diese müssen sich von den Teams der Major Leagues nicht verstecken.
(V.l.n.r.) Martin Bauernschmitt, Helmut Engelhardt und Christian Wendt bei der Unterstützung des Dürer-Gymnasiums Nürnberg
Vielen Dank an die Technische Hochschule Nürnberg für die Einladung, das Event unterstützen zu dürfen. Insbesondere geht unser Dank an Herrn Prof. Dr. Stefan May für die Organisation des Events und seinen großen Einsatz durch solche Veranstaltungen die Jugend für das Thema Robotik und die Ingenieurswissenschaften zu begeistern.
Das FRANCOR e.V. Team am letzten Tag mit (v.l.n.r.) Helmut Engelhardt, Michael Schmidpeter, Martin Bauernschmitt, Tobias Zech und dem Organisator Prof. Dr. Stefan MayUnser Roboter Frank war natürlich auch mit am Start
Auch dieses Jahr nehmen wir wieder am RoboCup German Open in Dortmund beim Deutschen Rettungsrobotik Zentrum teil. Dieses Jahr ist unser Ziel mehr Autonomie und weniger teleoperierte Aufgaben zu bewältigen. Aus diesem Grund liegt der Fokus diesmal stark auf der Software und weniger auf der Mechanik.
Es treten mit 10 Teams deutlich mehr Herausforderer an als die letzten Jahre. Wir freuen uns bereits auf den Wettbewerb!
Wir sind diemsal mit vier Leuten von FRANCOR vertreten:
Martin Bauernschmitt
Helmut Engelhardt
Michael Schmidpeter
Tobias Zech
Zum ersten Mal mit dabei ist unser neues Vereinsmitglied Tobias Zech.
0. Tag, 22.04.2023 – Anfahrt
Im Gegensatz zu den Jahren zuvor wurde beschlossen einen Tag vorher anzureisen, um den kompletten Sonntag für vorbereitende Arbeiten zu nutzen. Die Fahrt nach Dortmund war wie immer anstrenged aber ereignislos. Mit einigen Pausen und wenig Verkehr waren wir knapp 6,5 Stunden unterwegs und erreichten unser Nachtlager für die nächsten Tage in Castrop Rauxel. Danach ging es ins Bett, um erholt in den ersten Tag zu starten.
1. Tag, 23.04.2023 – Aufbau und Setup
Am nächsten Morgen ging es direkt zur Halle der DRZ in Dortmund. Erstmal ging es darum alle Werkzeuge, PCs und Arbeitsplätze einzurichten. Dabei mussten wir zunächst ein Malheur im Anhänger beseitigen, nachdem sich unsere zuckerhaltigen Kaltgetränke nach der holprigen Fahrt auf den Autobahnen des bevölkerungsreichsten Bundeslands Deutschlands etwas Leckage geschlagen haben. Unser Roboter Frank hat schon Schlimmeres erlebt und konnte im nächsten Schritt anstandslos in Betrieb genommen werden. Neu bespeert mit der Frankenflagge in der Hand und einem Auge weniger ist unser Roboter bereit. Ein Daumen Hoch für den ersten produktiven Tag hier in Dortmund!
Um die bevorstehenden Hindernisparkours auch autonom zu bewältigen, ist eine genaue Positionsangabe des Roboters essentiell. Deswegen war einer der kritischen Punkte die Verbesserung und Kalibrierung der Odometrie in ROS. Außerdem wurden einige Softwarepakete auf die neueste ROS2 Version von „Galactic“ auf „Humble“ umgezogen. Aufgrund dieser Umstellung musste der für die Steuerung des Roboterarms zuständige Raspberry Pi ebenfalls aktualisiert werden. Ubuntu Server und ROS2 Humble neu zu installieren stellte sich als die praktikablere Vorgehensweise heraus. Des weiteren wurde noch microros installiert, mit dem die Firmware der an dem Roboterarm angebrachten Microcontroller geupdated werden konnte. Der Greifer am Roboterarm hat sich über die Fahrt lose gerüttelt. Deshalb musste dieser sukzessive zerlegt werden, um an die gelockerte Schraube zu kommen und den Greifer wieder befestigen zu können. Danach wurden die ersten zögerlichen Bewegungen des Roboterarms durchgeführt. Weiterhin arbeiteten wir an der Auflösung des Kamerasystems.
Unsere Herausforderungen waren im wesentlichen:
Odometrie
Von ROS galactic auf humble migrieren
Mechanische Ausbesserungen
Kamera kalibrieren
QR Code Detection
Schlussendlich wurde der Tag mit der ersten erfolgreichen Testfahrt von Frank vor unserem Stand beendet.
2. Tag, 24.04.2023 – Vorbereitungen für den Wettbewerb
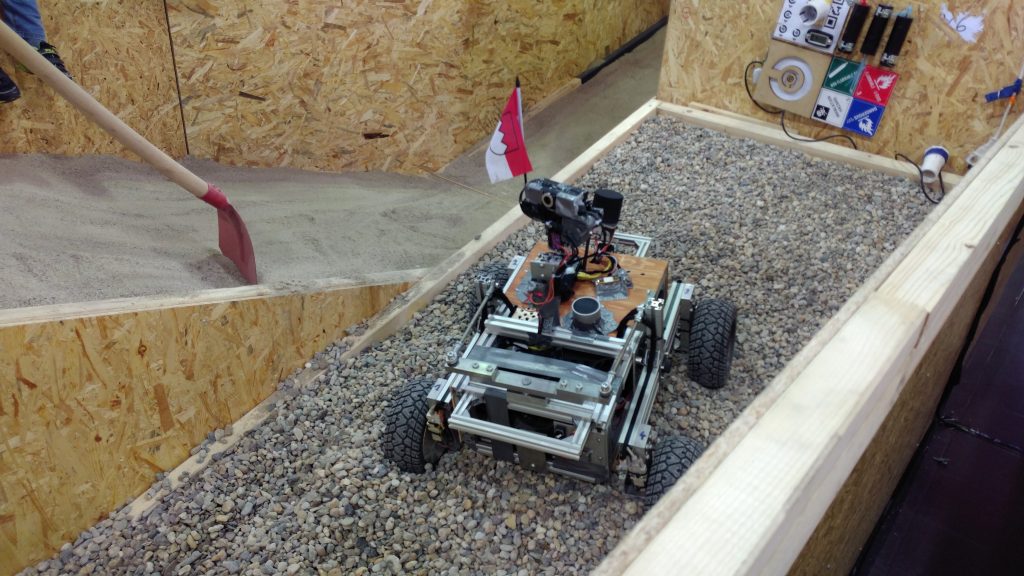
Erste Testläufe von Frank im Hinderniskurs
Hazmat Detection in schwarz/weiß mit Yolo
QR Code Detekction
find object 2D
Der 3D Drucker lief an diesem Tag auf Hochtouren. Zunächst wurde eine neue Lösung für die Nivellierungselektronik des Laserscanners benötigt. Nach einigen Prototypen haben alle Komponenten ihren Platz gefunden und die Nivellierungselektronik mit der IMU sitzt nun plan zu den horizontalen Achsen des Roboters. Da einige Activities und Hindernisparkours in suboptimalen Lichtverhältnisen stattfinden, die Hazmat bzw. Objekterkennung diese allerdings voraussetzt, musste eine Lösung gefunden werden. Mit Hilfe einiger Neopixel, eines ESP8266 und ein wenig Code und Lötarbeit wurde das Cover für die Kamera am Roboterarm umdesigned und erstrahlt nun in weiß (bzw. RGB). Zuguterletzt kam noch eine befreundete Gruppe aus der Schweiz, das Team Solidus, mit zwei STL Dateien zu uns, die wir natürlich ebenfalls über Nacht haben drucken lassen.
Am Abend kamen alle Teamleiter zusammen, um eine Einführung in die Hindernisparkours und zugehörigen Activities zu bekommen. Danach wurden die entsprechenden Zeitslots der ersten 6 Herausforderungen des Folgetages nacheinander von den Teamleitern gesetzt. Am Ende des Tages hat sich auch gezeigt, dass sich von den zunächst 10 angemeldeten Teams nur 7 in Dortmund eingefunden haben. Mit einem weinenden Auge bedauern wir die Abmeldung des befreundeten Teams ResQBot aus Österreich, die aufgrund eines Totalschadens am Antriebsstrang nicht antreten können.
3. Tag, 25.04.2023 – Jetzt gehts los….
… jedenfalls haben das die anderen Teams gesagt, nachdem am Morgen der Gong für die ersten 3 Herausforderungen geschlagen wurde. Allerdings haben sich unsere beiden Senior Teammitglieder, Michael und Martin, strategisch klug entschlossen, am Morgen drei Hindernisläufe zu planen, die von Frank physikalisch nicht befahren werden können. So hatten wir die Chance und die Zeit weiter an der Software und Mechanik zu feilen und Systeme ausgiebig zu testen. Wir haben die Chance zudem genutzt, einen der beiden Hindernisläufe des heutigen Tages zu testen. Dieser Testlauf war recht kurz, nachdem eine instabile Wifi Verbindung eine exakte Steuerung des Roboters und Roboterarms unmöglich machte. Die Vermutung lag auf einer zu hohen Auflösung des Kamerabildes, welches die drahtlose Verbindung überlastete. Eine kleine Anpassung in der Konfiguration des ROS nodes konnte vermeintlich Abhilfe bei diesem Problem schaffen.
Nach einer mittaglichen Stärkung folgte sogleich der erste Hindernislauf unseres Roboters. Dort wurde Frank manuell über angewinkelte und teilweise lockere Sperrholzplatten gefahren und musste weitere visuelle Aufgaben bestehen, die analog auch in anderen Hindernisparkours gefordert sind. Der Roboter schaffte 9 von 10 Durchläufen, bevor er aufgrund eines bis dahin unbekannten Motorproblems streikte. Ein gutes, wenn auch nicht ganz zufriedenstellendes Ergebnis für den ersten Run. Nach einer kurzen, fieberhaften und letztendlich ergebnislosen Suche nach dem Problem starteten wir in den zweiten Parkour. Dort erschwerte am Boden angebrachtes Fachwerk die Fahrt. Auch hier stießen wir wieder auf das mysteriöse Motorproblem, allerdings nachdem die Verbindung zum Roboter durch ein fremdes Signal unbrauchbar gemacht wurde und der Run letztendlich abgebrochen werden musste. In der zweiten Pause konnten wir den Fehler identifizieren. Die Motoren streikten aufgrund von unzureichender Batteriespannung. Nachdem wir die Ersatzbatterien in Betrieb genommen haben, lief Frank im 3. Lauf des Tages beinahe problemlos. Der Boden dieses Parkours war zweigeteilt und knöcheltief mit Schotter oder feinem Sand bedeckt. Beides stellte für Frank kein Hindernis dar und durch die meisterhaften Fahrkünste unseres Operators Michael, konnten 9 Durchläufe und diverse Activities erfolgreich abgeschlossen werden. Im letzen Durchlauf zwang ein überlaufender RAM Speicher, aufgrund eines ROS Cam Nodes, die Verbindung zum Roboter in die Knie und damit den Run zum Abbruch. 2 von 3 erfolgreichen Runs stellten kein zufriedenstellendes Ergebnis für unser Team dar. Dennoch sind wir sehr zuversichtlich, die letzten 6 Parkours am nächsten Tag mit Bravour zu bestehen.
Zum Abschluss des Tages sicherte sich Martin unsere gewünschten Zeitslots an den Hindernisläufen für den nächsten Tag, nachdem wir die momentane Punkteskala studiert haben.
4. Tag, 26.04.2023 – Ein Tag voller Herausforderungen
Heute war zweifellos der wichtigste Tag für unser Team, da wir eine Reihe von Hinderniskursen mit unserem Roboter bewältigen mussten. Bisher verlief alles reibungslos, ohne größere Probleme, abgesehen von einem lockeren USB-Kabel am CAN-Adapter, das jedoch rasch behoben wurde. Allerdings funktionierte die Autonomie während der ersten Durchläufe nicht wie geplant. Dies war eine anfängliche Herausforderung, die wir jedoch im Laufe des Tages erfolgreich bewältigen konnten, sodass am Abend nach den Wettläufen die Autonomie das erste Mal einwandfrei funktionierte. Dies gab unserem Team neuen Schwung und Selbstvertrauen.
Am späten Nachmittag wurden die Ergebnisse der einzelnen Durchläufe, die wir am gestrigen und heutigen Tag bestritten hatten, durchgegeben:
MAN3: 430 Punkte, 100%
MAN7: 920 Punkte, 88%
OBS2: 0 Punkte
OBS3: 0 Punkte
TER1: 140 Punkte, 30%
TER2: 140 Punkte, 64%
TER3: 660 Punkte, 80%
DEX6: 60 Punkte, 43%
Nach der Wertung befanden wir uns auf Platz 4, wodurch wir uns neben 3 weiteren Teams unerwartet für das Finale qualifiziert hatten. Das Ziel stand fest: das Podium. Allerdings standen wir damit vor einer neuen Herausforderung, als wir uns über die Anforderungen im finalen Hindernislauf weiter informiert haben. Dichter Nebel soll in diesem Lauf starke Rauchentwicklung in einem geschlossen Raum simulieren und wird die Sicht erheblich erschweren. Um dieses Problem zu lösen, hatten wir drei mögliche Lösungswege ausgetüftelt:
Ultraschallsensoren: Wir wollten Ultraschallsensoren als Gürtel um den Roboter anbringen, um Hindernisse in der Nähe zu erkennen und ggf. die Autonomie zu verbessern.
Stärkere Beleuchtung: Eine weitere Überlegung war die Verwendung einer stärkeren Beleuchtung, um den Nebel zu durchdringen und die Sicht zu verbessern.
Verbesserung der Infrarotkamera: Eine Verbesserung der Infrarotkamera durch Kalibrierung, um die Hindernisse im Nebel besser erkennen zu können, würde mit Abstand die beste Lösung darstellen.
Mit diesen Maßnahmen hofften wir bereit zu sein, uns der Herausforderung des finalen Hindernislaufs zu stellen, sofern wir diese in der begrenzten Zeit umsetzen können. Unser unerwartetes Qualifikationsergebnis hat unsere Motivation noch weiter gesteigert und wir sind zuversichtlich, dass wir unser Bestes geben werden, um gute Ergebnisse zu erzielen und das Rennen erfolgreich abzuschließen.
5. Tag, 27.04.2023 – Finale! und Rückreise
Obwohl uns der gestrige Abend noch in den Knochen steckt, starteten wir motiviert in unseren letzten Tag. Das Finale ruft und trotz der Rückschläge erhofften wir uns ein gutes Ergebnis. Die Beleuchtung wurde angebracht, um im abgedunkelten Raum und dichten Nebel halbwegs Sicht zu erhalten. Die Infrarotkamera funktionierte zwar und übermittelte ein Bild. Die Qualtität des Bildes ist aufgrund der Temperaturauflösung des SEEK Wärmebildkameramoduls zu gering. Eine spontane Lösung mit Hilfe von Ultraschallsensoren zu bauen war aufgrund der limitierten Zeit und Abdeckung (ungenügende Anzahl an Ultraschallsensoren) nicht erfolgreich. Besonders bei dieser versuchten Lösung hat sich wiedermal gezeigt, dass der Robocup nicht nur Teamgeist innerhalb der einzelnen Crews sondern auch über Teamgrenzen hinaus existiert.
Ein letztes Mal bereiteten wir Frank auf die ihm bevorstehende Herausforderung vor. Diese besteht im Prinzip aus drei zusammenhängenden Etappen. Zuerst muss analog zu DEX6 eine Tür geöffnet werden. Ein Unterschied zu jener Aufgabe bestand aber darin, dass der Henkel der Tür im Finaldurchlauf ein paar cm höher angebracht war. Der hastig angebrachte Haken war zu tief um den Türgriff zu betätigen, weswegen wir hier vermutlich auf einen Trick angewiesen waren. Die 2. Etappe fand in einem abgedunkelten Raum statt, der mit verschiedenen Hindernissen wie Querbalken, Tonnen und anderen am Boden angebrachten Gegenständen ein Vorankommen erschweren sollen. Die Hauptherausforderung ist allerdings der Grund, warum wir uns die Nacht zuvor um die Ohren geschlagen haben -> der Nebel. Von unseren drei Lösungswegen konnten wir nur die Beleuchtung realisieren. Dementsprechend waren wir nervös, ob wir überhaupt eine Möglichkeit haben, den Raum zu durchqueren. Die letzte Etappe bestand aus einem Raum, gefüllt mit kleinen Aufgaben. Unter anderem musste man mit einem Holzdorn eine Öffnung eines Containers verschließen und ein Ventil abdrehen.
Wir waren das 2. Team, das den finalen Hindernisparkour befahren durfte. Die Nervosität stand uns ins Gesicht geschrieben. Bereits die erste Etappe stellte sich als unüberwindliches Hindernis heraus. Die fehlenden cm waren zu viel für Frank und beim verzweifelten Versuch die Türklinke zu betätigen, verlor er leider seinen Greifarm. Trotz dieses Fehlschlags wurde uns erlaubt die zweite Etappe zu bestreiten. Doch auch dort war aufgrund der starken Nebelentwicklung schnell Schluss. Frank passierte zunächst souverän den Durchgang, drehte sich allerdings nicht genug im Gang was unserem Operator Michael Schmidpeter aufgrund der fehlenden Sensorik nicht auffiel. Frank bewegte sich langsam vorwärts. Durch die leicht schräge Trajektorie zog sich Frank mit seinem linken Rad die Wand hinauf, wodurch er ins Kippen kam und seinen (Sensorik)Kopf verlor. Damit war der Wettbewerb für uns vorbei. Mit diesem doch sehr desaströsen Findaldurchlauf verteidigten wir zwar unseren 4. Platz, aber nur da Team 5 aus Aachen ihren Roboterhund Spot nicht in dem Hindernislauf riskieren wollten.
Und damit endete unsere xte Teilnahme am RoboCup Rescue German Open in Kassel. Nach der Siegerehrung gratulierten wir Team Hector und unserem ewigen Rivalen Team AutonOhm 😉 zu ihren wohlverdienten 1. und 2. Plätzen. Somit packten wir unsere sieben Sachen und traten als Sieger der Herzen unsere Heimfahrt an.
Es hat wie immer sehr viel Spaß gemacht. Wir wollen uns auch bei allen teilnehmenden Teams bedanken, die den RoboCup Rescue erst zu dem genialen Ereignis machen das es ist. Wir waren leider nicht so erfolgreich wie erhofft, lassen uns allerdings durch diese Rückschläge nicht entmutigen. Letztendlich konnten wir die Zeit am RoboCup nutzen, um Frank wieder ein paar Funktionen mehr zu spendieren und nächstes Jahr von einer gestärkten Position zu starten. We will be back!
Am 23.07.2022 war es endlich so weit, das Finale des Find-Life-on-Mars Projekts wurde, im Siemens Impulse in Amberg ausgetragen.
Kurz zusammengefasst war die Aufgabe im Finale Leben in einem Parkour zu finden, welcher einer Marsumgebung nachempfunden war. Der Parkour und die „Life-Pods“ wurde von den Schüler-Teams den „martians“ gebaut und sollten es den „robotics“ schwer machen Leben zu finden. Das Leben wurde über ein Differenzbild erkannt, das heißt, wenn der Roboter steht und sich noch etwas im Bild bewegt, wurde angenommen, dass es sich um Leben handelt. Immer, wenn die „robotics“ Leben gefunden haben, bekamen diese Punkte, welche den „martians“ abgezogen wurde.
Einige Mitglieder von FRANCOR e.V. waren dabei, um beim Wettbewerb zu unterstützen. Dabei kam glatt RoboCup-Feeling auf, da natürlich viel in letzter Minute noch umgebaut und getestet werden musste.
Explizit haben wir dabei geholfen, das WLAN-Modul auszutauschen, da das ursprüngliche Modul nur 2,4 GHz-Fähig war. Aufgrund der Tatsache, dass alle Schülerteams im gleichen Netzwerk agieren sollten, wäre dieses schnell überlastet gewesen. Aus diesem Grund musste ein 5G WLAN-Router auf den Robotern installiert werden. Die besondere Herausforderung war die Spannungsversorgung des Routers, da diese ebenfalls noch nicht vorhanden war und installiert werden musste.
Ein weiterer Punkt war das Zusammenbringen der Teams im Netzwerk. Jetzt wird’s ein bisschen technisch: Da alle Teams auf ROS – Robotic Operating System setzen, mussten hier noch einige Konfigurationen vorgenommen werden, um einen Betrieb der Roboter im gemeinsamen Netzwerk zu ermöglichen. Dafür mussten auf allen Robotern und Operator-Stationen der ROS-Master korrekt eingestellt werden und Namespaces für die Teams vergeben werden. Bis alle vier Schülerteams bereit waren, verging etwas Zeit, aber danach konnte der eigentliche Wettbewerb losgehen.
Zusammengefasst war es ein schönes Projekt, an welchem FRANCOR e.V. auch im nächsten Jahr wieder teilnehmen wird. Hoffentlich mit etwas mehr Vor-Ort-Terminen ohne etwaige Corona Einschränkungen.
Ein herzlicher Dank an alle Schüler, Lehrer, Studenten, Professoren und Firmen, die bei dem Projekt unterstützt haben! Bis zum nächsten Mal!
Wir sind am 21.05.2022 bei der Langen Nach der Wissenschaften Nürnberg – Fürth – Erlangen dabei!
Das Projekt Find-Life-On-Mars wird an der Technischen Hochschule Nürnberg vorgestellt. Die Schülerteams zeigen hier ihren aktuellen Stand und auch wir stellen unseren Roboter „Frank“ aus, welcher erst letzte Woche wieder auf dem RoboCup Rescue 2022 in Dortmund zu sehen war.
Die Infos zum Event findet Ihr auf der offiziellen Webseite der Langen Nacht der Wissenschaften – Link
Vom 27. September bis zum 30. September war es endlich wieder soweit. Nach einem Jahr Pause konnten wir endlich wieder am RoboCup teilnehmen, welcher dankenswerter Weise vom Deutschen Rettungsrobotik Zentrum in Dortmund ausgetragen wurde. Ein RoboCup mit den anderen Ligen war Corona bedingt leider nicht möglich, deshalb trafen sich die RoboCup Rescue Teams diesmal im kleineren Rahmen.
Auch unser Roboter „Frank“ hat leider nicht den Entwicklungssprung vollzogen, welchen wir uns gewünscht hätten, da wir uns vor Ort nur schwer treffen konnten. Allerdings hat Michael Schmidpeter uns einen Roboterarm bauen können, welcher uns erstmals die Teilnahme an den Dexterity Challenges ermöglichte.
Wie immer konnten wir unsere Stärken in Challenges ausspielen, in denen Geschwindigkeit gefragt war, da wir aufgrund unseres radgetriebenen Roboters deutlich fixer unterwegs sind als die anderen Teams. Allerdings leidet darunter die Geländegängigkeit.
Aus diesem Grund sind für den nächsten RoboCup neue Antriebe geplant, welche erstens regelbar sind und zweitens deutlich mehr Drehmoment bringen. Jedoch werden wir dann nicht mehr so durch MAN 4 heizen können. Der Vorteil an den geregelten Motoren wäre aber, dass wir mit dem richtigen Rad geländegängiger werden und durch die Regelung endlich autonom unterwegs sein können. Dazu aber mehr in einem späteren Blog-Beitrag.
Team
Das Team hat sich im Vergleich zum Jahr 2019 leicht geändert. Leider war Matthias Frank nicht mehr dabei, da er beruflich bedingt aus Nürnberg weggezogen ist. Das Gründerteam Christian Wendt, Michael Schmidpeter und Martin Bauernschmitt waren wieder vertreten. Mit am Start war unser Neuzugang Helmut Engelhardt, der seit Februar 2020 ordentliches Mitglied von FRANCOR e.V. ist.
Teamliste:
Martin Bauernschmitt
Helmut Engelhart
Michael Schmidpeter
Christian Wendt
Anreise
Am 26. September startete unsere Reise nach Dortmund. Die Anreise war mit über 5h Fahrtzeit relativ anstrengend aber gegen 20:30 Uhr kamen wir dann auf dem Gelände des DRZ an.
Unser erster Eindruck war erstmal WOW! Die Austattung des DRZ ist bemerkenswert! Das DRZ besitzt eine 1300 m² große Halle, welche bestens für die Entwicklung und Tests von Rettungsrobotern ausgesatattet ist. Neben einem Einsatzfahrzeug mit Blaulicht, um den Roboter im Ernstfall ins Einsatzgebiet zu bringen, besitzt die Halle auch ein Motion Tracking System, um die Genauigkeit des Lokalisierungssystems zu überprüfen.
Nach dem ersten Umsehen haben wir unseren Anhänger ausgeladen und sind dann in die Unterkunft gefahren, um fitt für den nächsten Tag zu sein.
27.09 – Montag / Setup
Am Montag startete die verkürzte Setupphase, welche normalerweise zwei Tage dauert.
Neben der generellen Inbetriebnahme des Roboters stand die Inbetriebnahme und der Test des Roboterarms an. Weiterhin hat unser Fahrer Michael Schmidpeter begonnen in den Parkours zu üben.
Extrem ungünstig war, dass am Nachmittag unser Konstanter kaputt gegangen ist, welchen wir zum Laden der Blei-Batterien benötigen. Zum Glück konnten wir in einem lokalen Laden einen Ersatz kaufen, wenn gleich dieser auch nicht ganz billig war.
28.09 – Dienstag / Preliminary
Am Dienstag starteten die ersten Wettbewerbe, in denen in verschiedenen standardisierten Testabschnitten die Fähigkeiten in den Bereichen Manövrieren, Mobilität, Geschicklichkeit und Erkundung unter Beweis zu stellen sind. Vor allem in dem Szenario der erhöhten Rampen konnte unsere Plattform mit über 100 Wiederholungen einen Rekordlauf erzielen. Hier punktet unsere Plattform durch die gute Manövrierbarkeit, Geschwindigkeit und dem Sensorkopf, welcher ein schnelles Umschalten der Kamera-Sichtrichtung ermöglicht.
Weiterhin konnten wir an diesem Tag zum ersten Mal den neuen Arm auf der Plattform erfolgreich inbetriebnehmen, was uns nun erlaubt auch an Manipulations- und erweiterten Erkundungsaufgaben teilzunehmen.
Als weitere Errungenschaft konnten wir die QR-Code-Erkennung und deren Eintragung in die Karte implementieren. Dies sichert uns in zukünftigen Erkundungsläufen nochmal zusätzliche Punkte.
Nach einem erfolgreichen Tag und gut gerüstet für die kommenden Wettbewerbe sind wir gespannt auf die kommenden Tage.
29.09 – Mittwoch / Preliminary
Heute ist der letzte Entscheidungstag vor dem Finale und nach dem entschieden wird, wer es in dieses schafft.
Am heutigen Tag haben wir an der Explorationschallenge teilgenommen, in der es darum geht, eine genaue Karte der Umgebung zu erstellen und in dieser gefundene Gegenstände und QR-Codes einzutragen. Hier konnten wir dank unserem nivellierten Laserscanner maßstabsgetreue Karten erstellen und mit der am Vortag fertig gestellten QR-Code-Erkennung noch zusätzliche Punkte erringen.
Weiterhin konnten wir endlich den Arm unter Beweis stellen. In der Aufgabe ging es darum, die Kappen von Rohröffnung zu entfernen und diese in ein vorgegebenes Behältnis zu platzieren sowie in die nun geöffnete Rohrendung hineinzublicken und die dort enthaltenen Zeichen zu erkennen. Leider gingen hierbei die Servomotoren des Greifers in Überstrom und ließen sich somit nicht mehr öffnen. Dies konnte jedoch durch ein geschicktes „Abschüttelmanöver“ des Deckels umgangen und die Aufgabe somit erfolgreich gemeistert werden.
Am Ende des Tages steht fest, wir haben es ins Finale geschafft! Die 4 Finalisten sind somit:
Team AutonOHM
Team Dynamics
Team Hector
Team Francor
30.09 – Donnerstag / Finale
Am Donnerstag startete das Finale des RoboCup Rescues. Da wir uns mit 333 Punkten für das Finale als 4. qualifiziert hatten, waren wir die Ersten die um 8:00 Uhr starten durften.
Das Setup war diesmal etwas näher an der Wirklichkeit als die letzten Finals. Das fiktive Szenario simulierte einen Chemieunfall in einem Labor. Es ging darum zu einem Lagerplatz vorzudringen, den gefährlichen Kanister über Thermografie zu identifizieren und letztendlich mit einem Stöpsel zu verschließen. Das Szenario kann man in folgende Aufgaben/Hindernisse aufteilen:
Start vom DRZ Einsatzfahrzeug
Öffnen einer Tür mittels Roboterarm
Durchfahrt eines verrauchten Ganges
Überwindung von Trümmern
Schließen eines Hahns durch Drehung mittels Roboterarm
Identifikation des gefährlichen Kanisters mittels Thermografie
Verschließen des Kanisters mittels Stöpsel
Rückfahrt zum Einsatzfahrzeug (erneute Fahrt über Trümmer, verrauchten Gang und Öffnen der Tür)
FRANCOR Finallauf
Es gab zusätzliche Punkte, wenn man eine Karte der Umgebung erstellt hat und in dieser HAZMAT Symbole sowie QR-Codes eingetragen hat.
Insgesamt hatte jedes Team 30 Minuten Zeit die Aufgaben zu meistern. War ein Team unterhalb der 30 Minuten fertig und hat alle Aufgaben erledigt, konnte es nochmal punkten!
Der Start aus dem DRZ-Rettungsfahrzeug (1) war natürlich kein Problem. Allerdings gelang es uns nicht mittels Roboterarm die Tür zu öffnen (2). Dieses Hindernis mussten wir leider überspringen, wodurch es keine Punkte dafür gab.
Die Fahrt durch den verrauchten Gang (3) war kein Problem. Hier hatten wir zu Beginn Bedenken, dass wir aufgrund des dichten Nebels nicht manövrieren können. Der Gang war nicht gerade sondern man musste mehrfach manövrieren.
Am Ende mussten wir lose Trümmer überwinden (4), welche in der Tür zum Gefahrstoffraum lagen. Dies war durch die starken Antriebe kein Problem. Wir konnten die Trümmer einfach wegschieben und überfahren.
Im Raum angekommen, mussten wir erstmal ein Dreh-Ventil mittels Roboterarm verschließen (5). Dafür war ein mehrfaches Greifen und Rotieren notwendig. Dies konnten wir schnell abschließen.
Dank unserer Thermokamera konnten wir den „gefährlichen“ Kanister im Raum schnell identifizieren (6).
Jetzt kam der schwierige Teil: Das Greifen des Stöpsels und das Verschließen des Kanisters (7). Dies hat unser Operator Michael Schmidpeter allerdings mit Bravour gemeistert.
Die Rückfahrt war bis zur Tür auch kein Problem. Diese wurde wieder geöffnet und dann war die Zeit auch schon abgelaufen.
Vom 26.9 – 30.9.2021 war FRANCOR e.V. beim RoboCup in der DRZ Edition mit dabei und unser Vorstand Christian Wendt erklärt, ab 1:30 auf was es beim RoboCup ankommt.
Das Jahr 2020 war, wie für viele, auch für FRANCOR ein anstrengendes Jahr. Viele Aktivitäten wurden abgesagt oder konnten wegen der Corona Pandemie nicht angetreten werden. Die gemeinsamen Treffen waren nur Online möglich und haben den Vereinszweck deutlich eingeschränkt. Trotzdem konnten wir ein paar Dinge umsetzen, eine Auflistung ist in diesem Jahresrückblick zu finden.
Hackaton@Evocortex
Am 15. Februar 2020 trafen wir uns bei der Firma Evocortex GmbH in Nürnberg, welche uns dankenderweise Ihre Räume für einen Hackathon zur Verfügung stellten. Das Ziel des Hackathons war es unseren Roboter für den Rescue Wettbewerb weiter zu verbessern. Ein schöner Nebeneffekt war, dass wir an diesen Termin ein neues Mitglied in unserem Verein begrüßen durften. Am Hackaton teilgenommen haben Christian, Helmut, Martin und Michael.
Die Galerie zeigt ein paar Eindrücke des Hackatons. Am Ende des Events hatte unser Roboter Morty einen Roboterarm für Inspektions- und Manipulationsaufgaben.
Hackaton@Evocortex
Der Hackaton kann beginnen.
Konzentriertes Arbeiten.
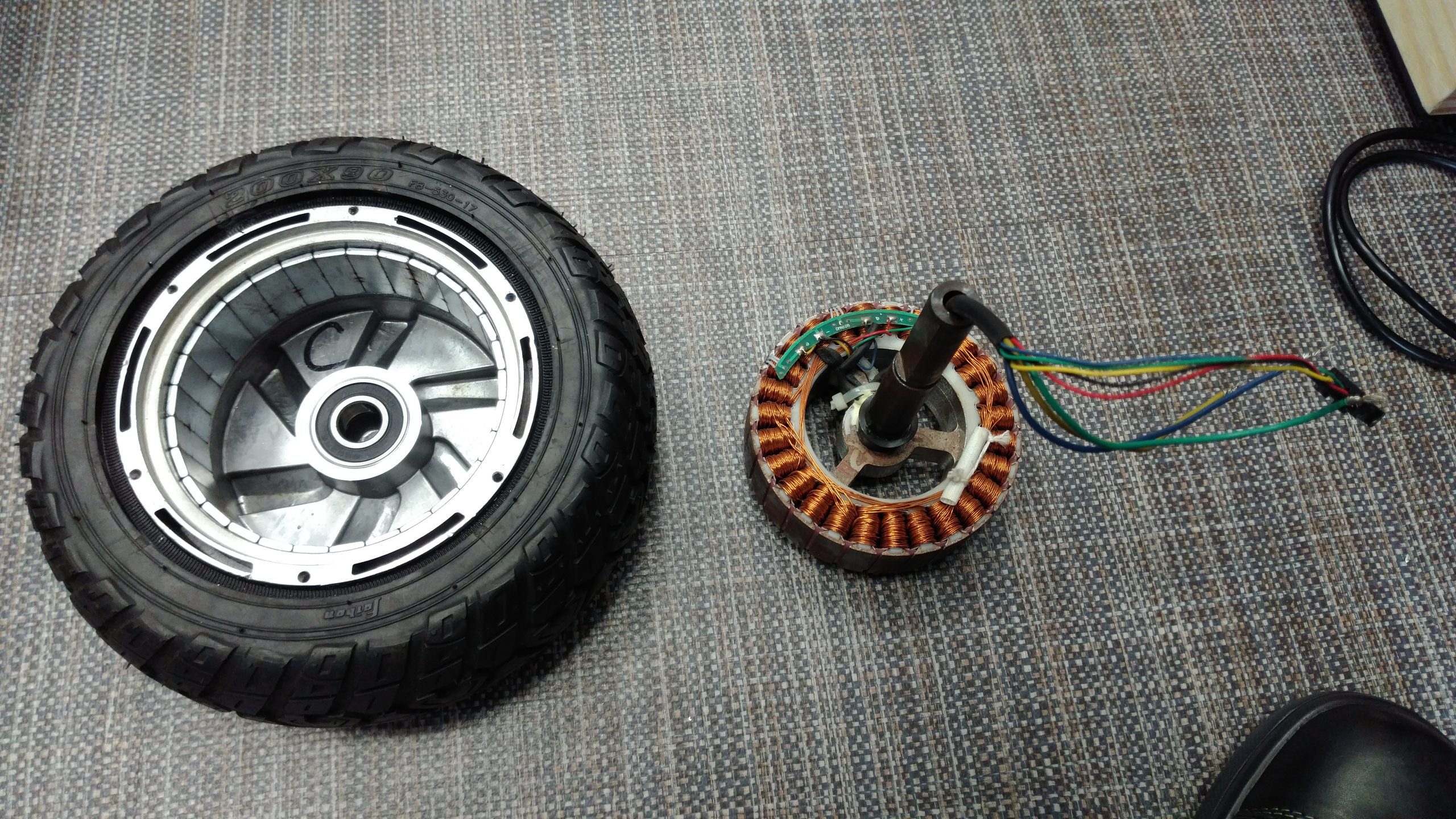
Demontierter Radnabenantrieb des Roboters.
Der neue Roboterarm auf unserem Roboter.
RoboCup German Open 2020
Der RoboCup 2020 in Magdeburg musste aufgrund der Corona Pandemie leider abgesagt werden. Ein alternatives Event beim Deutschen Rettungsrobotik-Zentrum (DRZ e.V.) in Dortmund Anfang November musste ebenfalls aufgrund der Pandemie abgesagt werden. Weiterhin wurde bereits der RoboCup 2021 in Magdeburg abgesagt, da es immer noch nicht sicher ist ob die Pandemie zu diesem Zeitpunkt überstanden ist. Wir hoffen demnächst wieder in der Rettungsrobotik aktiv zu sein, rechnen aber auch 2021 mit hohen Einschränkungen.
RoboCup Rescue Arena @TH-Nürnberg
Um besser für den Robocup Rescue besser trainieren zu können, wurde beim Team AutonOHM beschlossen eine Arenanachbildung aufzubauen. Freundlicherweise hat das Team AutonOHM erlaubt, dass auch wir dort Trainieren dürfen. Danke Dafür.
Natürlich haben wir als Team Francor beim Aufbau geholfen.
Fertig aufgebaute Arena von hinten.Arena von Vorne. (Links: Operator Station)
Jahreshauptversammlung 28.12.2020
Am 28.12.2020 trafen sich alle Mitglieder des Vereins Online über das Programm Discord. Neben den normalen organisatorischen Themen wurde, wie in der Satzung festgelegt, ein neuer Vorstand gewählt. Als Vorstand wurden einstimmig folgende Personen gewählt:
1. Vorstand: Christian Wendt
2. Vorstand: Michael Schmidpeter
Kassenwart: Michael Weidinger
Weiterentwickliung Libfrancor C++
Im Rahmen unser Roboter-Entwicklung wird eine C++ Bibliothek entwickelt, die benötigte Features zur Navigation, Wahrnehmung und Interpretation der Umgebung und für die Manipulation dieser bereit stellen soll. Die Besonderheit gegenüber bestehender Open Source Bibliotheken ist der Fokus auf Prozesskontrolle und Diagnose und weniger auf den Algorithmen selbst. Wir sehen das Wissen über den Zustandes des Systems (Roboter) als sehr wichtig an und möchten mit dieser Bibliothek dem nachkommen.
Die Bibliothek ist momentan immer noch in der Entwicklung und nicht released. Wir konnten aber dieses Jahr gute Fortschritte verzeichnen. Es wurde unter anderem an folgenden Features entwickelt:
Logging
Parameter Handling
Occupancy Grid Registrierung- und Rekonstruktionsmethoden
Kalman Filter für Ego Objekt Filterung mit Transition und Sensor Modell Design
Basic Grid und Array Klassen mit erweiterten Iterator Zugriff Klassen und Shared Memory Ansatz für geteilten Content
Unser Team nimmt bereits seit dem Jahr 2018 an dem RoboCup Rescue Wettbewerb in Magdeburg teil. Ziel des Wettbewerbs ist es die Entwicklung mobiler Rettungsroboter zu fördern, welche im Katastrophenfall Rettungskräfte unterstützen können. Das meist genannte Beispiel ist hier die Suche nach vermissten Personen in einsturzgefährdeten Gebäuden nach einem Erdbeben.
Die Roboter sollen ferngesteuert oder im Optimalfall autonom in die Gebäude fahren, diese kartieren und verschüttete Personen in die erstellte Karte einzeichnen. Dies soll eine Rettung ermöglichen ohne Rettungskräfte in Gefahr zu bringen. Ein weiterer Vorteil ist, dass mehrere Roboter gleichzeitig eingesetzt werden können, um die Suchkapazitäten zu erhöhen. Das Interessante an dieser Aufgabe ist, dass viele Disziplinen in einer Aufgabe vereint werden, denn folgende Aufgaben gibt es zu lösen:
Entwicklung eines robusten und geländegängigen Fahrwerks (Maschinenbau)
Aufbau des entwickelten Fahrwerks (Mechanik)
Entwicklung und Integration von Leistungs-/Antriebselektronik, Sensorik und Rechenleistung (Elektronik)
Entwicklung von Software zur Antriebssteuerung, Sensordatenverarbeitung, Kartierung und Autonomie uvm. (Mathematik, Softwareentwicklung)
Auch betriebswirtschaftliche Interessen dürfen nicht vergessen werden: Der Roboter muss kostengünstig zu bauen sein, um für die breite Masse erschwinglich zu sein. Dies ist durch die finanziellen Mittel unseres Vereins bereits vorgegeben, da wir aktuell über keine große Förderung verfügen.
Team
Das gesamte Team besteht aus ehemaligen Mitgliedern des RoboCup Teams AutonOhm der Technischen Hochschule Nürnberg. Alle Vereinsmitglieder wollten weiterhin in der Rettungsrobotik aktiv bleiben und haben aus diesem Grund FRANCOR e.V. gegründet.
Teamfoto vom RoboCup Rescue 2019 (c) Florian Gramß: Christian Merkl, Matthias Frank, Michael Schmidpeter und Martin Bauernschmitt (von links nach rechts)
Die Teammitglieder hatten folgende Aufgaben:
Christian Merkl: Elektronik und Softwareentwicklung
Matthias Frank: Mechanik und Elektronik
Michael Schmidpeter: Elektronik und Softwareentwicklung
Martin Bauernschmitt: Mechanik und Embedded-Softwareentwicklung
Vorbereitung
Werkzeugsuche mit vollem Körpereinsatz
Anreise
Warten vor der Messehalle Magdeburg
Auf einen erfolgreichen RoboCup
Unterkunft
Die Anreise zum RoboCup startete am 30.4.2019 als sich das gesamte Team auf den Weg nach Magdeburg machte. Als Unterkunft diente eine Ferienwohnung nahe der Messe Magdeburg, wo der Wettbewerb ausgetragen wurde.
Setupphase @ RoboCup
Am 1.4.2019 startet ab 12:00 Uhr die sogenannte Setup-Phase des RoboCup Wettbewerbs. An diesem Tag dürfen alle Teams die Messehalle betreten und anfangen ihren Bereich aufzubauen. Weiterhin ist es möglich mit dem Roboter in die verschiedenen Hindernisparkours zu fahren, um erste Tests durchzuführen.
Sehr wichtig! Die Kaffeeversorgung wird eingerichtet
Matthias kümmert sich um den Sensorkopf
Test des Sensorkopfs mit einem Standard-Sensortestboard
Test der Operatorstation von unseren Operator Michael
Erste Fahrt im Parkour ...
... unter prüfenden Blicken vom Christian
Challenges @ RoboCup
Die Qualifizierung für das Finale erfolgt durch Erreichen einer hohen Punktzahl bei den gestellten Aufgaben. Eine Aufgabe ist zum Beispiel MAN-4, das Überqueren von verschränkten Rampen. Hier wird die Anzahl der Fahrten vom Start- zum Endpunkt und zurück innerhalb einer vorgegebenen Zeit gezählt. Alle Infos können dem offiziellen Regelwerk entnommen werden.
MAN-4 Aufgabe: Der Roboter muss den Parkour so oft wie möglich in einer vorgegeben Zeit durchqueren
Jeder Roboter muss an sechs Basistests teilnehmen:
MAN 1: Center – Fahrt durch eine Verengung
MAN 2: Align – Balancieren über zwei blaue Balken
MAN 3: Traverse – Fahren über eine Steigung wobei eine Linie nicht überfahren werden darf
MAN 4: Crossover – Verschränkte Rampen
MAN 5: Negotiate – Fahren durch vertikale Hindernisse
MAN 6: Curb – Überfahren eines schrägen Balkens auf dem Boden
Es kann vorkommen, dass am RoboCup Rescue German Open nicht alle MAN Aufgaben aufgebaut sind. Diesmal wurde beispielsweise MAN 5 nicht durchgeführt. Die folgenden Abbildungen verdeutlichen noch einmal die Tests und sind ein Auszug aus dem offiziellen Regelwerks des Wettbewerbs.
MAN 1: Center – Fahrt durch eine Verengung
MAN 2: Align – Balancieren über zwei blaue Balken
MAN 3: Traverse – Fahren über eine Steigung bei der eine Linie nicht überfahren werden darf
MAN 4: Crossover – Verschränkte Rampen
MAN 5: Negotiate – Fahren durch vertikale Hindernisse
MAN 6: Curb – Überfahren eines schrägen Balkens auf dem Boden
Neben den Basistests gibt es noch die Spezialisierungen MOB (Mobilität) und DEX (Dexterity – Fingerfertigkeit/Manipulation mit Roboterarm). Unser Roboter hat es im Jahr 2019 aufgrund eines fehlenden Roboterarms nicht geschafft an DEX teilzunehmen. Auch der Bereich MOB bot einige Herausforderungen. Gut meistern konnten wir hingegen MOB-2: Die Sand-/Kieskiste
Unser Rettungsroboter bei MOB-2
Fazit
Wir konnten uns wie im schon Jahr 2018 für das Finale qualifizieren. Allerdings reichte es nicht für einen Platz unter den besten Drei. Daher gibt für uns noch einiges zu tun: Beispielsweise müssen wir die Antriebe und die Geländegängigkeit des Roboters optimieren. Weiterhin haben wir die meisten Aufgaben ferngesteuert absolviert – dies wollen wir nächstes Mal ändern, um autonom fahren zu können.
Zum Schluss bleibt noch zu sagen: Ein Dank an alle Teams und Teilnehmer, die Organisatoren und natürlich unsere Mitglieder die im Hintergrund tätig sind und sich um die Organisation sowie die Finanzen kümmern.
Update: Auch wenn der Wettbewerb 2020 aufgrund der Corona-Pandemie leider ausfallen musste, nutzen wir diese „Zwangspause“, um unseren Rettungsroboter und unser Team schon auf nächstes Jahr vorzubereiten. Wir freuen uns auf 2021!