

Unser Team nimmt bereits seit dem Jahr 2018 an dem RoboCup Rescue Wettbewerb in Magdeburg teil.
Ziel des Wettbewerbs ist es die Entwicklung mobiler Rettungsroboter zu fördern, welche im Katastrophenfall Rettungskräfte unterstützen können. Das meist genannte Beispiel ist hier die Suche nach vermissten Personen in einsturzgefährdeten Gebäuden nach einem Erdbeben.
Die Roboter sollen ferngesteuert oder im Optimalfall autonom in die Gebäude fahren, diese kartieren und verschüttete Personen in die erstellte Karte einzeichnen. Dies soll eine Rettung ermöglichen ohne Rettungskräfte in Gefahr zu bringen. Ein weiterer Vorteil ist, dass mehrere Roboter gleichzeitig eingesetzt werden können, um die Suchkapazitäten zu erhöhen.
Das Interessante an dieser Aufgabe ist, dass viele Disziplinen in einer Aufgabe vereint werden, denn folgende Aufgaben gibt es zu lösen:
- Entwicklung eines robusten und geländegängigen Fahrwerks (Maschinenbau)
- Aufbau des entwickelten Fahrwerks (Mechanik)
- Entwicklung und Integration von Leistungs-/Antriebselektronik, Sensorik und Rechenleistung (Elektronik)
- Entwicklung von Software zur Antriebssteuerung, Sensordatenverarbeitung, Kartierung und Autonomie uvm. (Mathematik, Softwareentwicklung)
Auch betriebswirtschaftliche Interessen dürfen nicht vergessen werden: Der Roboter muss kostengünstig zu bauen sein, um für die breite Masse erschwinglich zu sein. Dies ist durch die finanziellen Mittel unseres Vereins bereits vorgegeben, da wir aktuell über keine große Förderung verfügen.
Team
Das gesamte Team besteht aus ehemaligen Mitgliedern des RoboCup Teams AutonOhm der Technischen Hochschule Nürnberg. Alle Vereinsmitglieder wollten weiterhin in der Rettungsrobotik aktiv bleiben und haben aus diesem Grund FRANCOR e.V. gegründet.

(c) Florian Gramß: Christian Merkl, Matthias Frank, Michael Schmidpeter und Martin Bauernschmitt (von links nach rechts)
Die Teammitglieder hatten folgende Aufgaben:
- Christian Merkl: Elektronik und Softwareentwicklung
- Matthias Frank: Mechanik und Elektronik
- Michael Schmidpeter: Elektronik und Softwareentwicklung
- Martin Bauernschmitt: Mechanik und Embedded-Softwareentwicklung
Vorbereitung

Anreise
 Warten vor der Messehalle Magdeburg
Warten vor der Messehalle Magdeburg


Die Anreise zum RoboCup startete am 30.4.2019 als sich das gesamte Team auf den Weg nach Magdeburg machte. Als Unterkunft diente eine Ferienwohnung nahe der Messe Magdeburg, wo der Wettbewerb ausgetragen wurde.
Setupphase @ RoboCup
Am 1.4.2019 startet ab 12:00 Uhr die sogenannte Setup-Phase des RoboCup Wettbewerbs. An diesem Tag dürfen alle Teams die Messehalle betreten und anfangen ihren Bereich aufzubauen. Weiterhin ist es möglich mit dem Roboter in die verschiedenen Hindernisparkours zu fahren, um erste Tests durchzuführen.
 Sehr wichtig! Die Kaffeeversorgung wird eingerichtet
Sehr wichtig! Die Kaffeeversorgung wird eingerichtet





Challenges @ RoboCup
Die Qualifizierung für das Finale erfolgt durch Erreichen einer hohen Punktzahl bei den gestellten Aufgaben. Eine Aufgabe ist zum Beispiel MAN-4, das Überqueren von verschränkten Rampen. Hier wird die Anzahl der Fahrten vom Start- zum Endpunkt und zurück innerhalb einer vorgegebenen Zeit gezählt. Alle Infos können dem offiziellen Regelwerk entnommen werden.

Jeder Roboter muss an sechs Basistests teilnehmen:
- MAN 1: Center – Fahrt durch eine Verengung
- MAN 2: Align – Balancieren über zwei blaue Balken
- MAN 3: Traverse – Fahren über eine Steigung wobei eine Linie nicht überfahren werden darf
- MAN 4: Crossover – Verschränkte Rampen
- MAN 5: Negotiate – Fahren durch vertikale Hindernisse
- MAN 6: Curb – Überfahren eines schrägen Balkens auf dem Boden
Es kann vorkommen, dass am RoboCup Rescue German Open nicht alle MAN Aufgaben aufgebaut sind. Diesmal wurde beispielsweise MAN 5 nicht durchgeführt.
Die folgenden Abbildungen verdeutlichen noch einmal die Tests und sind ein Auszug aus dem offiziellen Regelwerks des Wettbewerbs.
 MAN 1: Center – Fahrt durch eine Verengung
MAN 1: Center – Fahrt durch eine Verengung





Neben den Basistests gibt es noch die Spezialisierungen MOB (Mobilität) und DEX (Dexterity – Fingerfertigkeit/Manipulation mit Roboterarm).
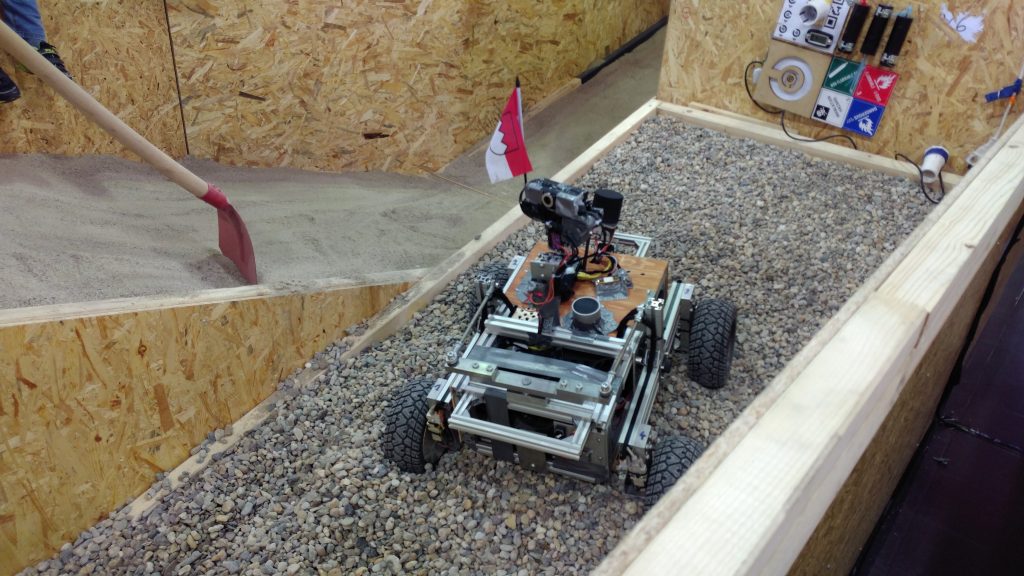
Unser Roboter hat es im Jahr 2019 aufgrund eines fehlenden Roboterarms nicht geschafft an DEX teilzunehmen. Auch der Bereich MOB bot einige Herausforderungen. Gut meistern konnten wir hingegen MOB-2: Die Sand-/Kieskiste
Fazit
Wir konnten uns wie im schon Jahr 2018 für das Finale qualifizieren. Allerdings reichte es nicht für einen Platz unter den besten Drei. Daher gibt für uns noch einiges zu tun: Beispielsweise müssen wir die Antriebe und die Geländegängigkeit des Roboters optimieren. Weiterhin haben wir die meisten Aufgaben ferngesteuert absolviert – dies wollen wir nächstes Mal ändern, um autonom fahren zu können.
Zum Schluss bleibt noch zu sagen: Ein Dank an alle Teams und Teilnehmer, die Organisatoren und natürlich unsere Mitglieder die im Hintergrund tätig sind und sich um die Organisation sowie die Finanzen kümmern.
Update:
Auch wenn der Wettbewerb 2020 aufgrund der Corona-Pandemie leider ausfallen musste, nutzen wir diese „Zwangspause“, um unseren Rettungsroboter und unser Team schon auf nächstes Jahr vorzubereiten.
Wir freuen uns auf 2021!